

Índice temático
Diferencia clave - Grupo de puntos vs lugar grupo
Los términos grupo puntual y grupo espacial se utilizan en cristalografía. La cristalografía es el estudio de la disposición de los átomos en un sólido cristalino. El grupo de puntos cristalográficos es un conjunto de operaciones de simetría que dejan al menos un punto sin mover. Una operación de simetría es un proceso de conservación de la imagen original de un objeto incluso después de haberlo movido. Las operaciones de simetría utilizadas en los grupos de puntos son rotaciones y reflexiones. Un grupo espacial es el grupo de simetría 3D de una configuración en el espacio. Un grupo de simetría es el conjunto de todas las transformaciones obtenidas sin cambiar la composición durante la operación de grupo. Que diferencia principal se encuentra entre el grupo puntual y el grupo espacial Hay 32 grupos de puntos cristalográficos, mientras que hay 230 grupos espaciales creados al combinar 32 grupos de puntos y 14 redes de Bravais.
Lectura relacionada: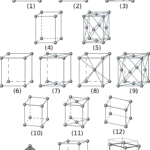 Diferencia entre celda unitaria y celda primitiva.
Diferencia entre celda unitaria y celda primitiva.CONTENIDO
1. Descripción general y diferencia clave
2. ¿Qué es un grupo de puntos?
3. ¿Qué es un grupo espacial?
4. Comparación lado a lado: grupo de puntos frente a grupo espacial en forma tabular
5. Resumen
¿Qué es un grupo de puntos?
El grupo de puntos cristalográficos es un conjunto de operaciones de simetría que dejan al menos un punto sin mover. Las operaciones de simetría descritas en grupos de puntos son rotaciones y reflexiones. En las operaciones de simetría de grupos de puntos, un punto central en el objeto se mantiene sin mover (fijo) mientras que otras caras del objeto se mueven a las posiciones de características del mismo tipo. Allí, las características macroscópicas del objeto deben permanecer iguales antes y después de la operación de simetría.
Para cualquier objeto dado, es posible un cierto número de operaciones de simetría (con relaciones geométricas definidas entre las operaciones de simetría). El objeto debe tener la simetría descrita por el grupo de puntos. Por lo tanto, diferentes objetos con diferentes simetrías de puntos se describen mediante diferentes grupos de puntos.
Lectura relacionada: Diferencia entre celosía y celda unitaria.
Diferencia entre celosía y celda unitaria.Se utilizan dos sistemas en la notación de grupos de puntos;
-
Notación de Schönflies
En el sistema de notación de Schoenflies, los grupos de puntos se denotan como CNevadaCNueva HampshireDNueva HampshireTes decirOHetc. Los diversos símbolos utilizados en este sistema de notación se dan a continuación.
- n es el número máximo de ejes de rotación
- v es el plano de simetría vertical (solo se menciona si no hay planos de simetría horizontales)
- h son los planos de simetría horizontales
- T es un grupo puntual tetraédrico
- es un grupo puntual octaédrico
Por ejemplo Cnorte se utiliza indica que el grupo de puntos tiene un eje de rotación de n veces. Cuando se especifica como CNueva Hampshiresignifica que hay una Cnorte junto con un plano de espejo (plano de reflexión) perpendicular al eje de rotación. Por otro lado C.Nevada es Cnorte con un plano de espejo paralelo al eje de rotación. Cuando el grupo de puntos se especifica como S2nindica que el grupo de puntos tiene solo un eje de rotación-reflexión de 2n pliegues.
Lectura relacionada: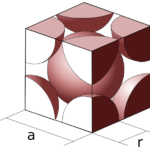 Diferencia entre BCC y FCC
Diferencia entre BCC y FCC-
Notación de Hermann Mauguin
El sistema de notación Hermann-Mauguin se usa comúnmente para grupos espaciales. Pero también se utiliza para grupos puntuales cristalográficos. Da el eje de rotación más alto. Por ejemplo, el grupo de puntos con solo un eje de rotación doble se indica con 2. El grupo puntual con C2 horas La notación de Schoenflies se da como 2/m en el sistema de notación de Hermann-Mauguin, en el que el símbolo "m" indica un plano de espejo y el símbolo de barra inclinada indica que el plano de espejo es perpendicular al eje doble. La siguiente tabla muestra diferentes notaciones de grupos de puntos para diferentes sistemas de cuadrícula.


Figura 01: Los planos de espejo y los planos de deslizamiento del hielo hexagonal indican que el grupo espacial de hielo es P63/mmc
Hay 32 grupos de puntos. Los grupos de puntos más simples son 1, 2, 3, 4, 5 y 6. Todos estos grupos de puntos involucran solo un eje de rotación. Para inversiones de rotación existen ejes denominados -1, m, -3, -4 y -6. Otros 22 grupos de puntos son combinaciones de estos grupos de puntos.
¿Qué es un grupo espacial?
Un grupo espacial es el grupo de simetría 3D de una configuración en el espacio. Hay 230 grupos espaciales. Estos 230 grupos son una combinación de 32 grupos de puntos cristalográficos (mencionados anteriormente) y 14 redes de Bravais. Que Rejilla Bravais se dan en la siguiente tabla.

Un grupo espacial describe la simetría de un cristal. Los grupos espaciales son combinaciones de simetría traslacional de la celda unitaria y operaciones de simetría tales como operaciones de simetría de rotación, inversión de rotación, simetría, eje de tornillo y plano de deslizamiento.
¿Cuál es la diferencia entre el grupo de puntos y el grupo espacial?
Grupo de puntos frente a grupo espacial |
|
| El grupo de puntos cristalográficos es un conjunto de operaciones de simetría que dejan al menos un punto sin mover. | Un grupo espacial es el grupo de simetría 3D de una configuración en el espacio. |
| componentes | |
| Hay 32 grupos de puntos cristalográficos. | Hay 230 grupos espaciales (generados combinando 32 grupos de puntos y 14 retículas de Bravais). |
| operaciones de simetría | |
| Las operaciones de simetría utilizadas en la detección de grupos de puntos son la rotación y la reflexión. | Las operaciones de simetría utilizadas en la detección de grupos espaciales son las operaciones de simetría de rotación, rotación inversa, reflexión, eje de tornillo y plano de deslizamiento. |
Resumen - grupo de puntos vs lugar grupo
Los grupos de puntos y los grupos espaciales son términos descritos en Cristalografía. El grupo de puntos cristalográficos es un conjunto de operaciones de simetría, todas las cuales dejan al menos un punto sin mover. Un grupo espacial es el grupo de simetría 3D de una configuración en el espacio. La diferencia entre el grupo de puntos y el grupo espacial es que hay 32 grupos de puntos cristalográficos, mientras que hay 230 grupos espaciales (producidos al combinar 32 grupos de puntos y 14 redes de Bravais).
Relación:
1. "2: Operaciones de simetría y elementos de simetría". Química LibreTexts, Libretexts, 6 de mayo de 2017. Disponible aquí
2. "Grupo de puntos cristalográficos". Wikipedia, Fundación Wikimedia, 28 de febrero de 2018. Disponible aquí
Imagen de cortesía:
1. "Ice Ih Space Group" por Dbuckingham42 - Trabajo propio, (CC BY-SA 4.0) a través de Commons Wikimedia
Diferencia entre aluminio y alúmina.

Diferencia entre aluminio y magnesio.
Diferencia entre sólido amorfo y cristalino.

Diferencia entre radiación ionizante y no ionizante
Diferencia entre bisulfito de sodio y metabisulfito de sodio.
Diferencia entre carbonato y bicarbonato.

Diferencia entre bicarbonato de sodio y detergente en polvo.

Diferencia entre silicio y germanio.

Diferencia entre oro y dorado.

Diferencia entre plata y placa de plata.

Diferencia entre latón y bronce.
Diferencia entre número de oxidación y carga.